Dynamisch-Mechanische Analyse (DMA) – Biegebeanspruchung
siehe auch:
Dynamisch-Mechanische Analyse (DMA) – Grundlagen
Dynamisch-Mechanische Analyse (DMA) – Zugbeanspruchung
Dynamisch-Mechanische Analyse (DMA) – Torsionsbeanspruchung
Grundlagen
Bei der dynamisch-mechanischen Analyse unter Biegebeanspruchung wird der genutzte Prüfkörper einer periodisch wechselnden Beanspruchung ausgesetzt, wobei durch die Variation der Frequenz der erzwungenen resonanten Schwingung die Charakterisierung der Zeitabhängigkeit des Werkstoffverhaltens möglich ist (DMA). Wird zusätzlich eine Temperierkammer verwendet, dann kann gleichzeitig die Temperaturabhängigkeit der untersuchten Eigenschaften für die betreffenden Kunststoffe erfasst und dargestellt werden (DMTA).
Durchführung der DMA unter Biegebeanspruchung
Die DMA bzw. die DMTA unter Biegebeanspruchung zählt zu den dynamisch-mechanischen Prüfverfahren mit resonanten Schwingungen, welches für die Charakterisierung viskoelastischer Eigenschaften und der Glastemperatur eingesetzt wird.
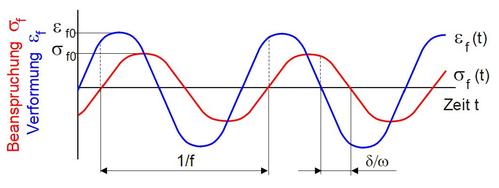
Dazu wird der Prüfkörper mit einer sinusförmig wechselnden mechanischen Beanspruchung veränderlicher Frequenz beansprucht, wobei in der Nähe der Resonanzen eine Überhöhung der Amplituden auftritt. Bei linear-viskoelastischem Materialverhalten weisen die zeitlichen Änderungen von Spannung und Dehnung die identische Frequenz, aber unterschiedliche Phasenlagen nach den Gln. (1) und (2) auf (Bild 1).

|
(1)
|

|
(2)
|
Infolge der Phasenverschiebung δ zwischen Beanspruchung (Spannung) und der Verformung (Dehnung oder Scherung) ist zur Beschreibung des Spannungs-Dehnungs-Zusammenhanges der Modul als komplexe Größe Ef* nach der Gl. (3) gültig.

|
(3)
|
Der komplexe Modul kann als Vektor in der komplexen Zahlenebene betrachtet werden (Bild 2), dessen Richtung durch den Phasenwinkel δ und dessen Betrag durch das Verhältnis der Amplitudenwerte von applizierter erzwungenen Spannung und Dehnung gegeben ist.
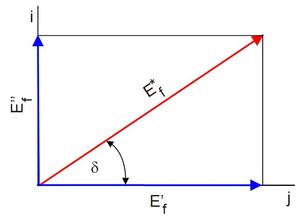
| Bild 2:
|
Darstellung des Biege-Moduls Ef* in der komplexen Zahlenebene
|
Der Absolutbetrag des jeweiligen Moduls ergibt sich aus dem Verhältnis der Initialbeanspruchung zur Ausgangsverformung nach der Gl. (4).

|
(4)
|
Unter Verwendung einfacher trigonometrischer Beziehungen ist dann eine Aufteilung in den Realteil Ef‘ und den Imaginärteil Ef‘‘, die mit den Gln. (5) und (6) vorgenommen wird. Der Realteil Ef‘ wird als Speichermodul bezeichnet und ist ein Maß für die während einer Schwingungsperiode gespeicherte reversible Energie Wrev. Der Imaginäranteil Ef‘‘ erfasst die in der jeweiligen Periode dissipierte Energie Wirrev und wird als Verlustmodul benannt. Aus dem Verhältnis von Verlust- und Speichermodul ergibt sich der Verlustfaktor d = tan δ, welcher das Dämpfungsverhalten des Werkstoffs nach Gl. (7) beschreibt. Der Wert δ ist dabei der sogenannte Phasenwinkel, der Werte zwischen 0 und π/2 annehmen kann [1].

|
(5)
|

|
(6)
|

|
(7)
|
Regt man einen Prüfkörper im Biegeschwingversuche nach DIN EN ISO 6721-3 [2] mit erzwungenen Resonanzschwingungen an, dann treten je nach verwendeter Einspannung und Prüfkörpergeometrie typische Prüfkörperresonanzen auf, die mit der Wellenlänge korrespondieren. Erfolgt die Anregung im Resonanzgebiet mit einer konstanten Kraftamplitude, so durchläuft die Amplitude der Auslenkung ein Maximum (Bild 3), wobei die jeweilige Resonanzfrequenz fi und deren Halbwertsbreite Δfi mit den viskoelastischen Eigenschaften des untersuchten Werkstoffs im Zusammenhang stehen.
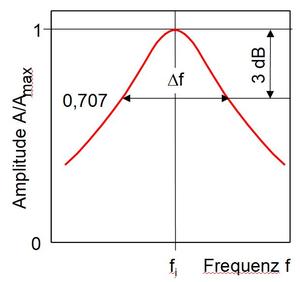
| Bild 3:
|
Schematische Resonanzkurve eines viskoelastischen Werkstoffs
|
Als Prüfkörper werden prismatischer Stäbe verwendet, die entweder einseitig eingespannt sind (Verfahren A) oder an Textilfäden in den Schwingungsknoten aufgehängt werden (Verfahren B) [2] (Bild 4). Die Anregung und Registrierung der Biegeschwingungen erfolgt berührungsfrei über induktive oder kapazitive Wandler, die über dünne, auf der Prüfkörperoberfläche des Kunststoffes aufgeklebte Metallplättchen.
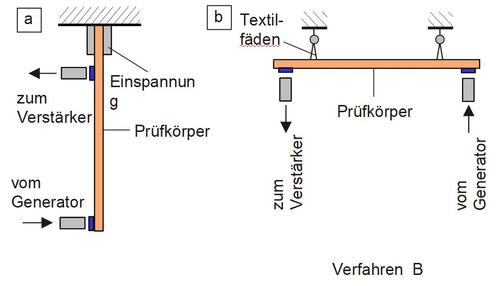
| Bild 4:
|
Prüfanordnung zur Ermittlung viskoelastischer Eigenschaften mit erzwungenen Schwingungen im Resonanzbereich (a) mit fest dreistäbiger Einspannung und (b) freier Aufhängung des Prüfkörpers
|
Die Differentialgleichung (8) der Biegeschwingung kann mittels des BERNOULLI-Ansatzes nach Gl. (9) gelöst werden, wodurch die Orts- und Zeitfunktion der Schwingung Gln. (10) und (11) entstehen.

|
(8)
|

|
(9)
|

|
(10)
|

|
(11)
|
| mit:
|
Efly
|
–
|
Biegesteifigkeit
|
| L
|
–
|
Prüfkörperlänge
|
| A
|
–
|
Prüfkörperquerschnitt
|
| F
|
–
|
Prüfkraft
|
| ρ
|
–
|
Prüfkörperdichte
|
| k
|
–
|
Prüfkörperdämpfung
|
| w
|
–
|
Prüfkörperdurchbiegung
|
| x
|
–
|
Amplitude
|
| ω
|
–
|
Kreisfrequenz
|
| βi
|
–
|
i-ter Eigenwert
|
Aus der Lösung des Eigenwertproblems nach Gl. (10) erhält man die Eigenwertgleichung der Differentialgleichung für die Resonanzfrequenzen nach Gl. (12) für die unterschiedlichen Lagerungsfälle des Prüfkörpers βi2, die in der Tabelle 1 dargestellt sind.

|
(12)
|
| Tabelle 1: Eigenwerte zur Bestimmung des Speichermoduls
|
| Ordnungszahl i
|
einseitig eingespannt (Verfahren A)
|
frei aufgehängt (Verfahren B)
|
| 1
|
3,52
|
22,4
|
| 2
|
22,0
|
61,7
|
| >2
|
(2i - 1)·π/2
|
(2i + 1)·π/2
|
Mit Hilfe eines Frequenzgenerators kann die Anregungsfrequenz f in einem Bereich von etwa 101 Hz bis 103 Hz kontinuierlich variiert werden. Beim Durchlaufen dieses Frequenzbereiches werden am Detektor mehrere Maxima der Schwingungsamplitude registriert, die den Resonanzstellen unterschiedlicher Ordnung i (i = 1, 2, 3, …) entsprechen, wobei die Resonanzamplitude mit zunehmender Ordnungszahl immer kleiner wird, da die Dämpfung ansteigt. Aus der Resonanzfrequenz fi der i-ten Resonanzstelle, der Dichte ρ des untersuchten Werkstoffs und den Abmessungen (freie Länge L und Dicke h) kann der Realteil (Speichermodul des komplexen Elastizitätsmoduls) nach Gl. (13) ermittelt werden.
![{\displaystyle E^{\prime }=48\pi ^{2}\cdot \rho {\frac {L^{4}}{h^{2}}}\left[{\frac {f_{i}}{\beta _{i}^{2}}}\right]^{2}}](https://de.wikipedia.org/api/rest_v1/media/math/render/svg/c240753ea547960c366e1268633dac432a449d27)
|
(13)
|
Aus der Halbwertsbreite der Resonanzkurve Δfi und der Resonanzfrequenz fi kann nach der Gl. (14) als weitere Kenngröße der Verlustfaktor tan δ und nach Gl. (15) der Verlustmodul berechnet werden, falls der Verlustfaktor des Werkstoffe ≤ 0,1 ist.

|
(14)
|

|
(15)
|
Bei Werkstoffen mit geringer Eigendämpfung (tan δ < 0,01) sollte die Analyse frei abklingender Schwingungen nach Abschalten des Erregers bei Resonanzfrequenz genutzt werden. Dabei entsteht eine Abnahme der Amplituden aufeinanderfolgender Schwingungen, aus der sich mit dem logarithmischen Dekrement Λ der Verlustfaktor ebenfalls bestimmen lässt (siehe Gl. (16)).

|
(16)
|
Ein entscheidender Nachteil des Verfahrens besteht darin, dass zur Auswertung oft nur relativ wenige Resonanzstellen zur Verfügung stehen und dass eine Beeinflussung der Lage der Resonanzstellen nur über die Veränderung der Prüfkörperabmessungen möglich ist. Bei temperaturabhängigen Messungen finden Veränderungen der Resonanzfrequenzen statt, so dass eine Ermittlung von Kennwerten bei konstanter Frequenz nicht möglich ist.
Gerätesysteme zur Durchführung der DMA
Bei der dynamisch-mechanischen Analyse oder Spektroskopie mittels Biegebeanspruchung werden für kleinere Prüfkräfte meistens Tischprüfsysteme (Stand Alone Systeme) verwendet. Gemeinsam ist allen Geräten, dass die Deformation des Prüfkörpers sehr klein ist und den linear-viskoelastischen Bereich nicht überschreiten sollte. Durch den Frequenzgenerator kann ein automatischer Frequenzdurchlauf erzeugt werden (Bild 5), der den Prüfkörper im Messstativ zu Schwingungen anregt. Die bei definierten Frequenzen entstehenden Amplitudenüberhöhungen können durch einen Schwingungsanalysator registriert und ausgewertet werden, wobei auch Informationen zur Dämpfungen und den Schwingungsmoden erhalten werden.
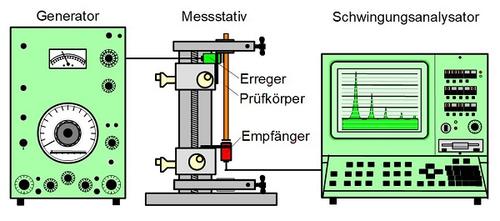
| Bild 5:
|
Schematischer Aufbau eines DMA-System der Fa. Brüel&Kjaer, Dänemark
|
Literaturhinweise
| [1]
|
Lüpke, T.: Grundlagen mechanischen Verhaltens. In: Grellmann, W., Seidler, S. (Hrsg.): Kunststoffprüfung. Carl Hanser Verlag, München (2015) 3. Auflage S. 91/92, (ISBN 978-3-446-44350-1; siehe AMK-Büchersammlung unter A 18)
|
| [2]
|
DIN EN ISO 6721-3 (1996-12): Kunststoffe – Bestimmung dynamisch-mechanischer Eigenschaften – Teil 3: Biegeschwingung; Resonanzkurven-Verfahren
|




